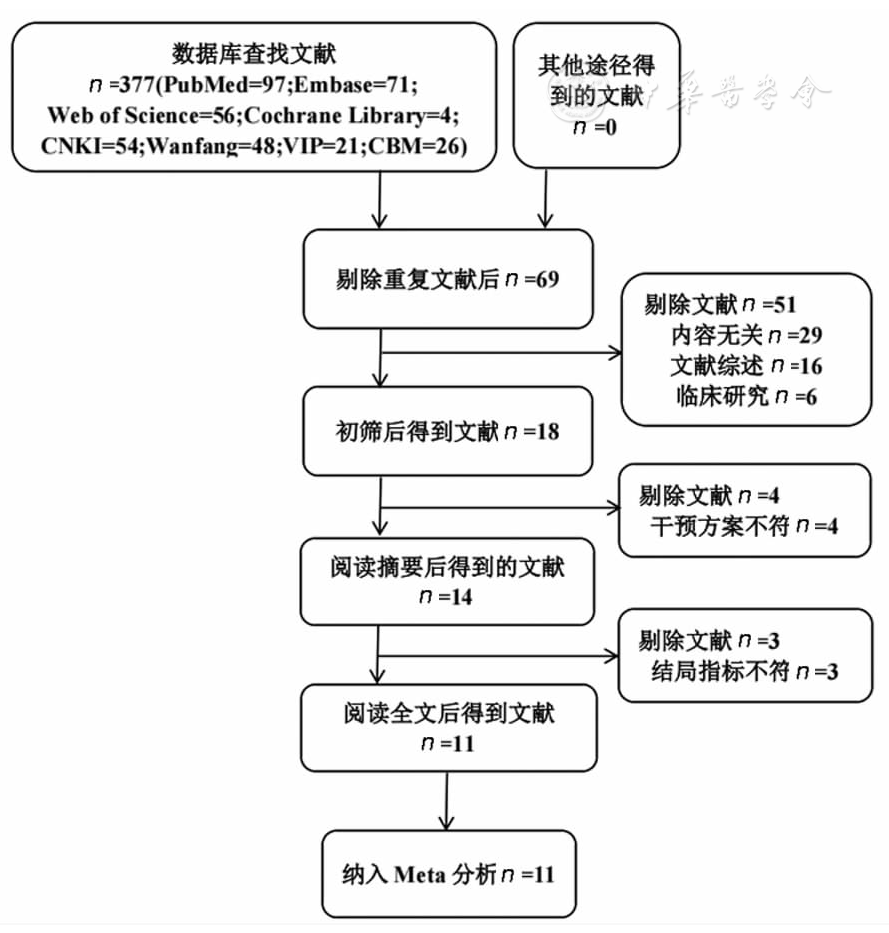
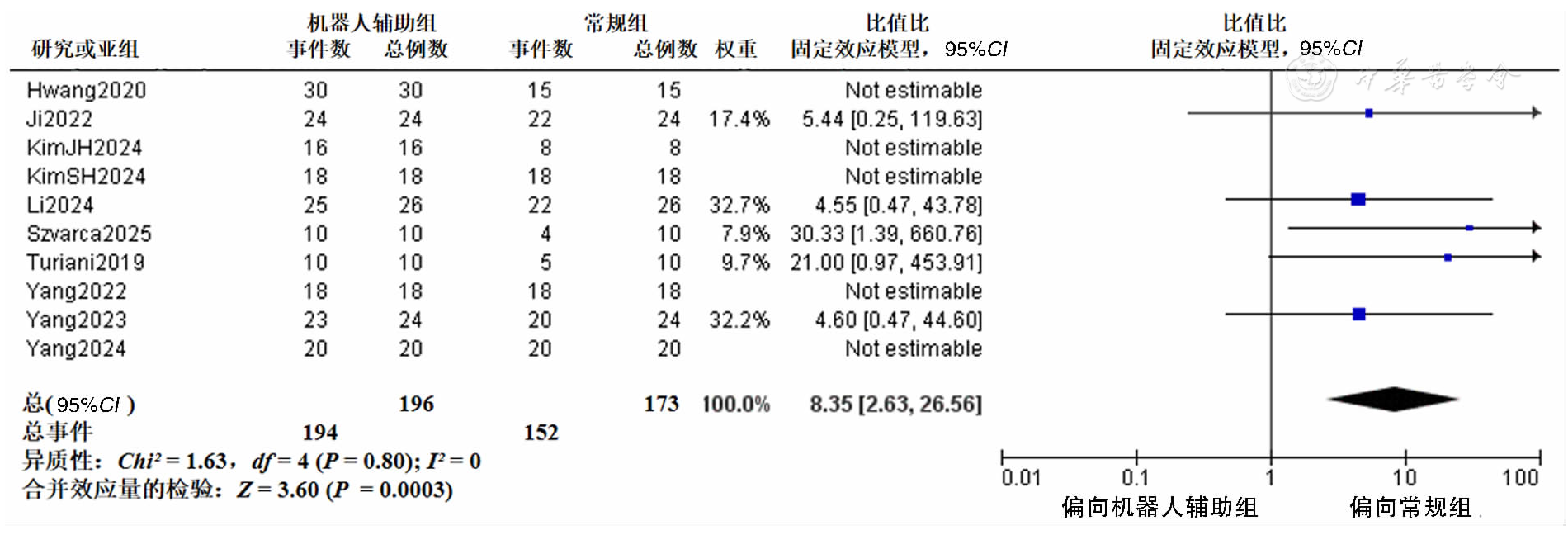
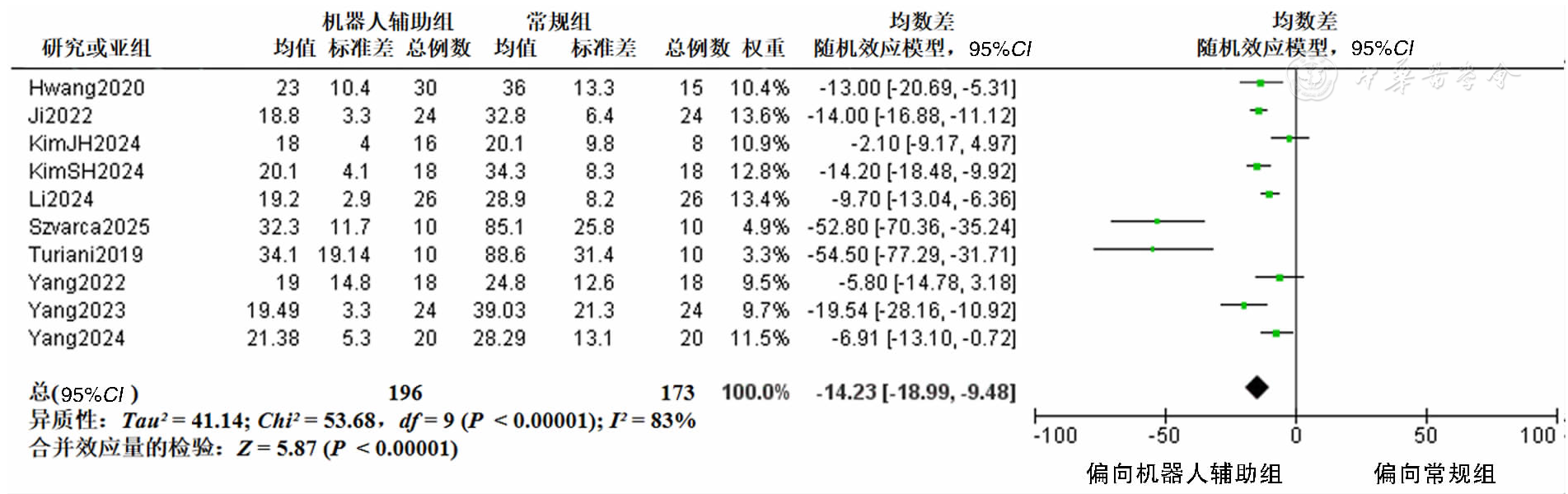
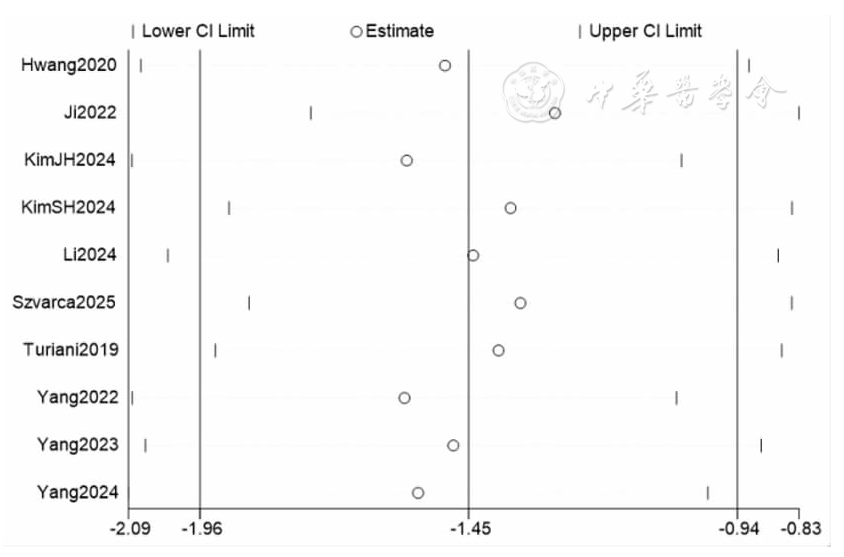
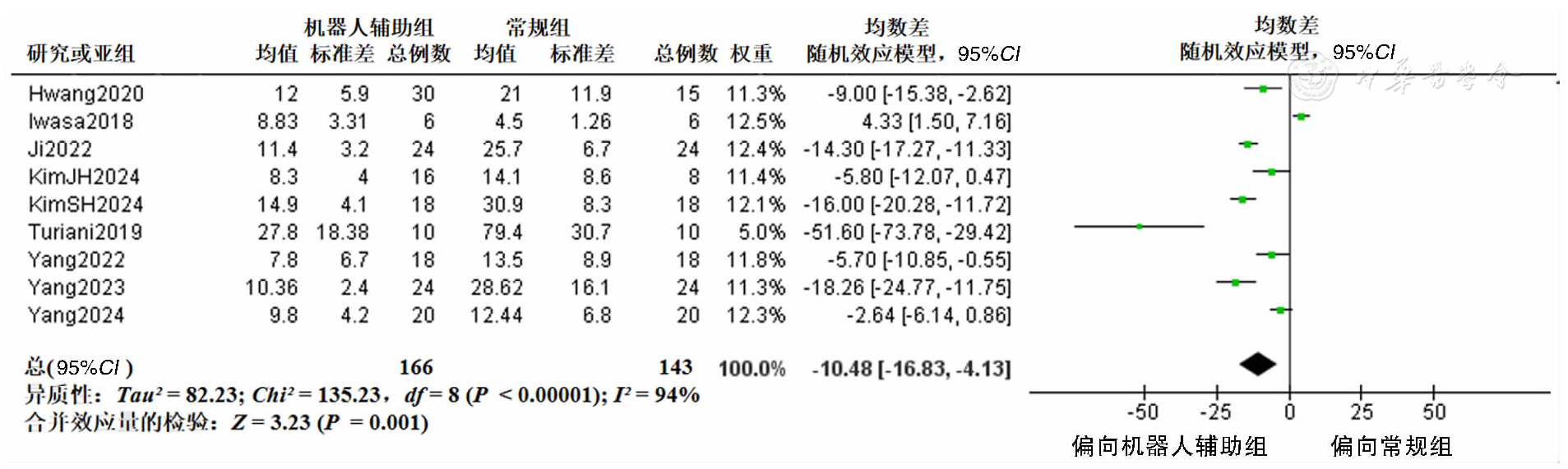
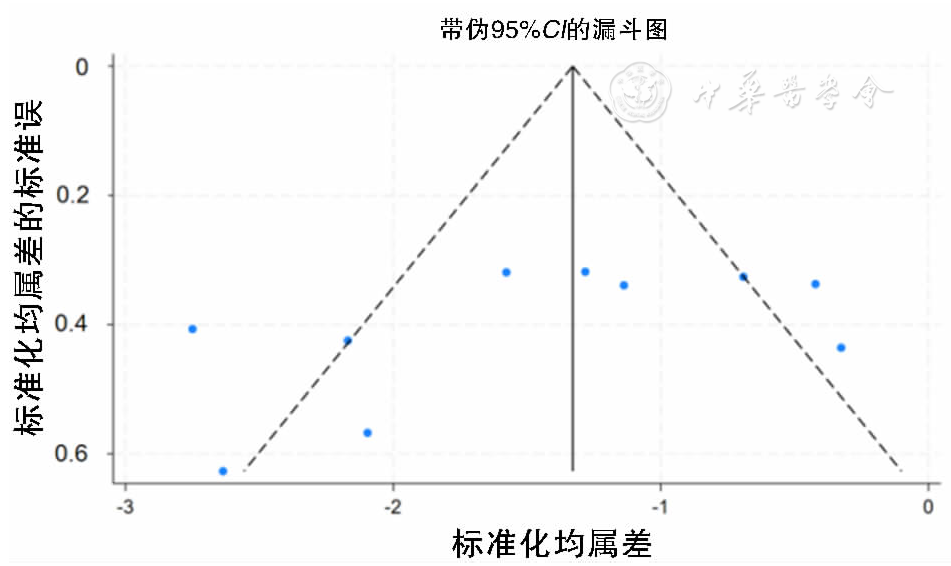
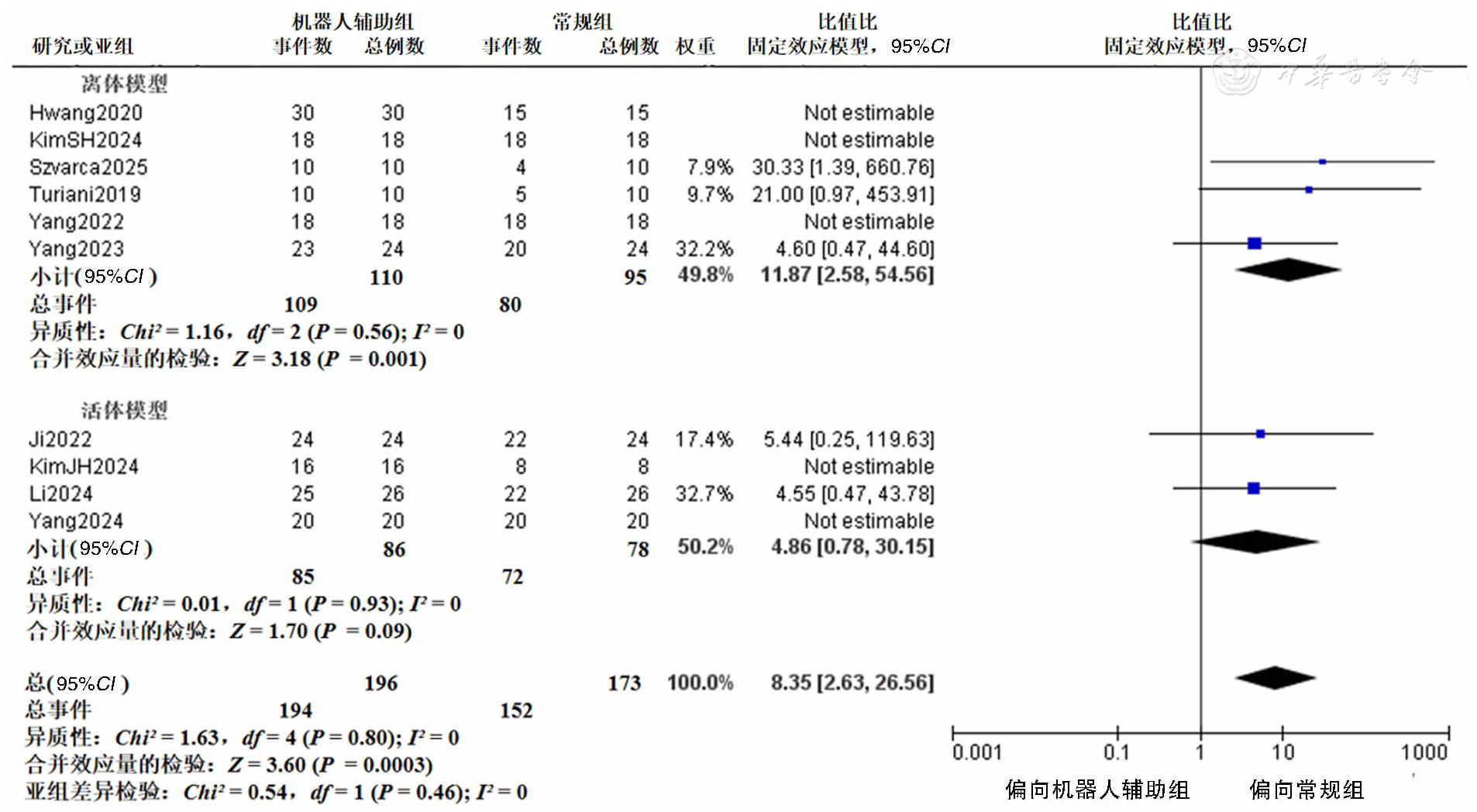
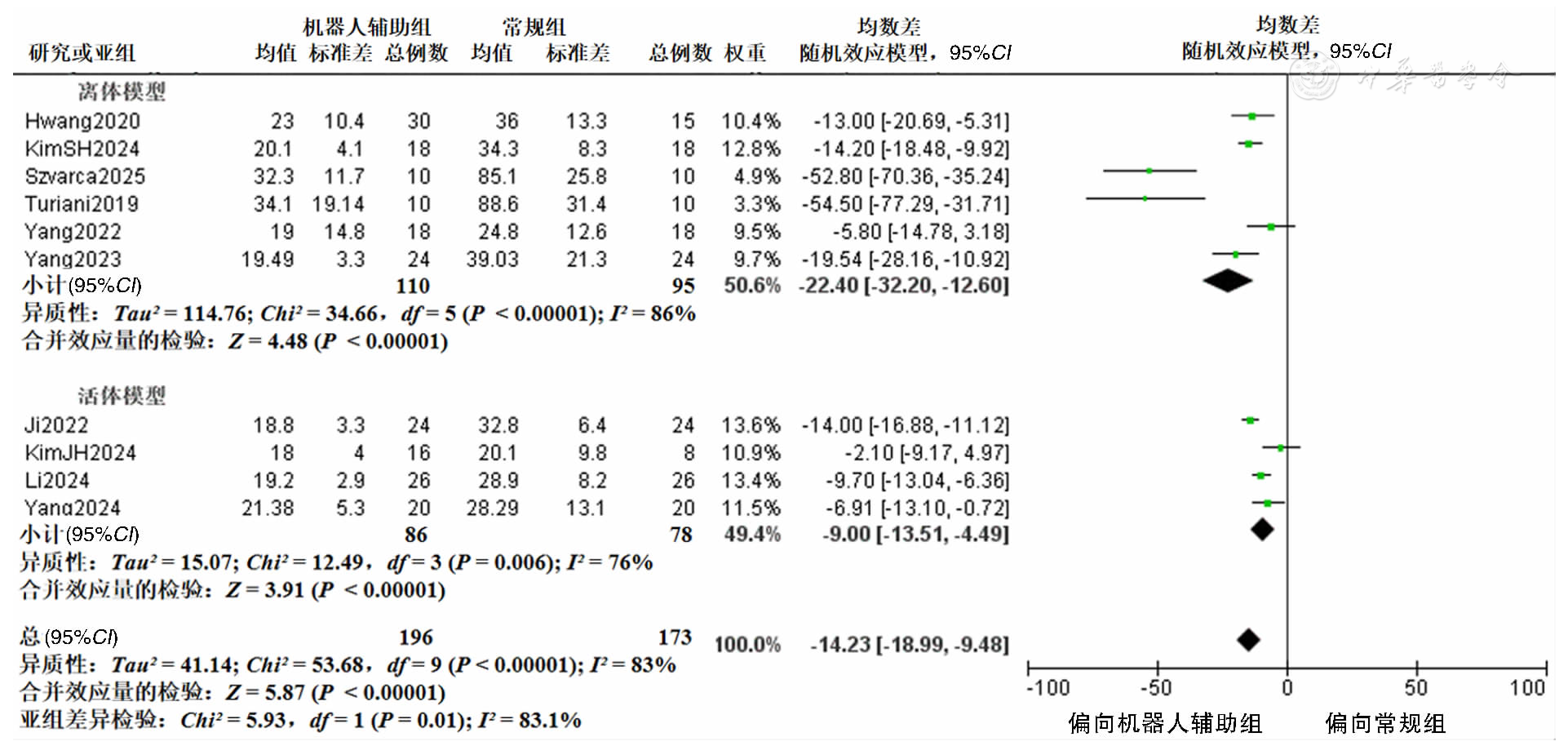
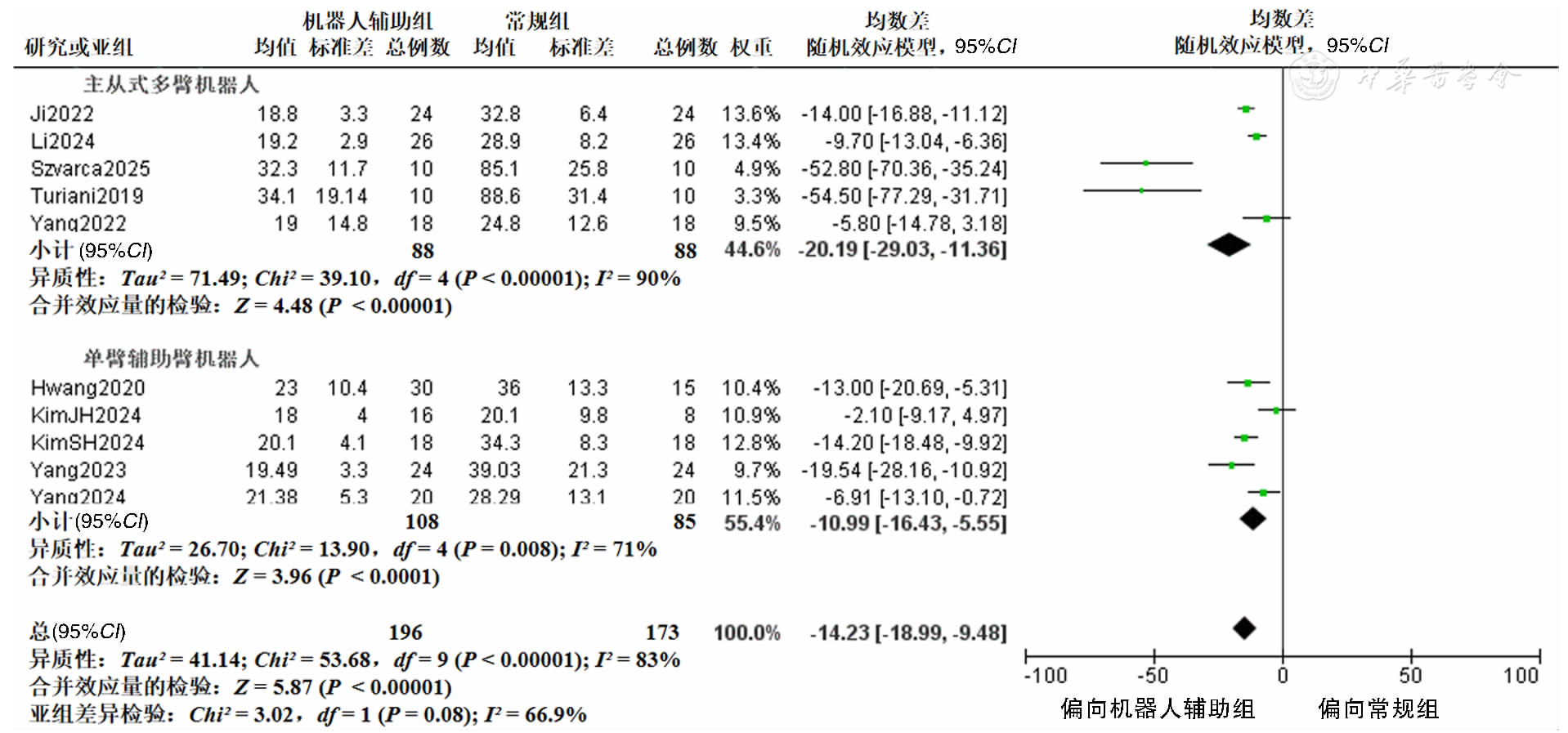
结果 共纳入11项动物实验研究(包含离体及活体模型)。分析结果显示,与常规操作相比,机器人辅助能显著提升整块切除率(OR=8.35,95%CI: 2.63, 26.56,P=0.0 003),并将黏膜下盲切率降低(MD=-19.49,95%CI: -25.03, -13.95,P<0.00001)。在手术效率方面,机器人辅助缩短总手术时间(MD=-14.23 min,95%CI: -18.99, -9.48,P<0.00 001)和黏膜下剥离时间(MD=-10.48 min,95%CI: -16.83, -4.13,P<0.00 001)。机器人辅助组的解剖速度亦显著高于常规组(MD=30.85 mm2/min, 95%CI: 18.54, 43.17,P=0.0003)。针对总手术时间的Egger′s检验提示该指标无明显发表偏倚(P=0.147),其余结局指标因纳入研究数量限制未进行发表偏倚评估。